joint and gimbal servo motor
dynamixel
you can use dynamixel_wizard2 to set the configuration from ubuntu/windows.
motor types:
- mx28AR
protocol: http://support.robotis.com/jp/product/dynamixel/mx_series/mx-28at_ar.htm - xh430
protocol: http://support.robotis.com/en/product/actuator/dynamixel_x/xh_series/xh430-w210_main.htm
general configuration:
baud rate: 3(i.e., 1Mbps)return delay time: 25[ms]operating mode: 5
id setting
slave_id of each neuron is incremented from 1 and set via rqt.
ID of servo motors connected to the same neuron is incremented from 1 for joints and gimbals, in that order.
The value of each ID in the Servo.yaml is incremented from 0 starting from the servo with ID 1 connected to neuron with slave_id 1.
Example
| slave_id of neuron | 1 | 1 | 1 | 2 | 2 | 2 | 2 | 3 | 3 | 3 |
| ID of dynamixel | 1 (joint) | 2 (gimbal) | 3 (gimbal) | 1 (joint) | 2 (joint) | 3 (gimbal) | 4 (gimbal) | 1 (joint) | 2 (joint) | 3 (gimbal) |
| id in Servo.yaml | 0 | 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 | 9 |
thrust rotor
- motor specification measurement: See here
ESC calibration
roslaunch spinal_ros_bridge serial.launch- Every time restart spinal, remember to publish topic to /uav_info, HydrusX example:
rostopic pub -1 /uav_info spinal/UavInfo "motor_num: 4 uav_model: 16 baselink: 2"- remove all the propeller for safety, unplugin all the ESC from power cable for safety
- publish topic with pwm maximum value (ESC NOT CONNECT TO Power Cable, DANGEROUS!!)
rostopic pub -1 /pwm_test std_msgs/Float32 "data: 0.95"(0.95 means 1900) - connect one ESC to respective power cable
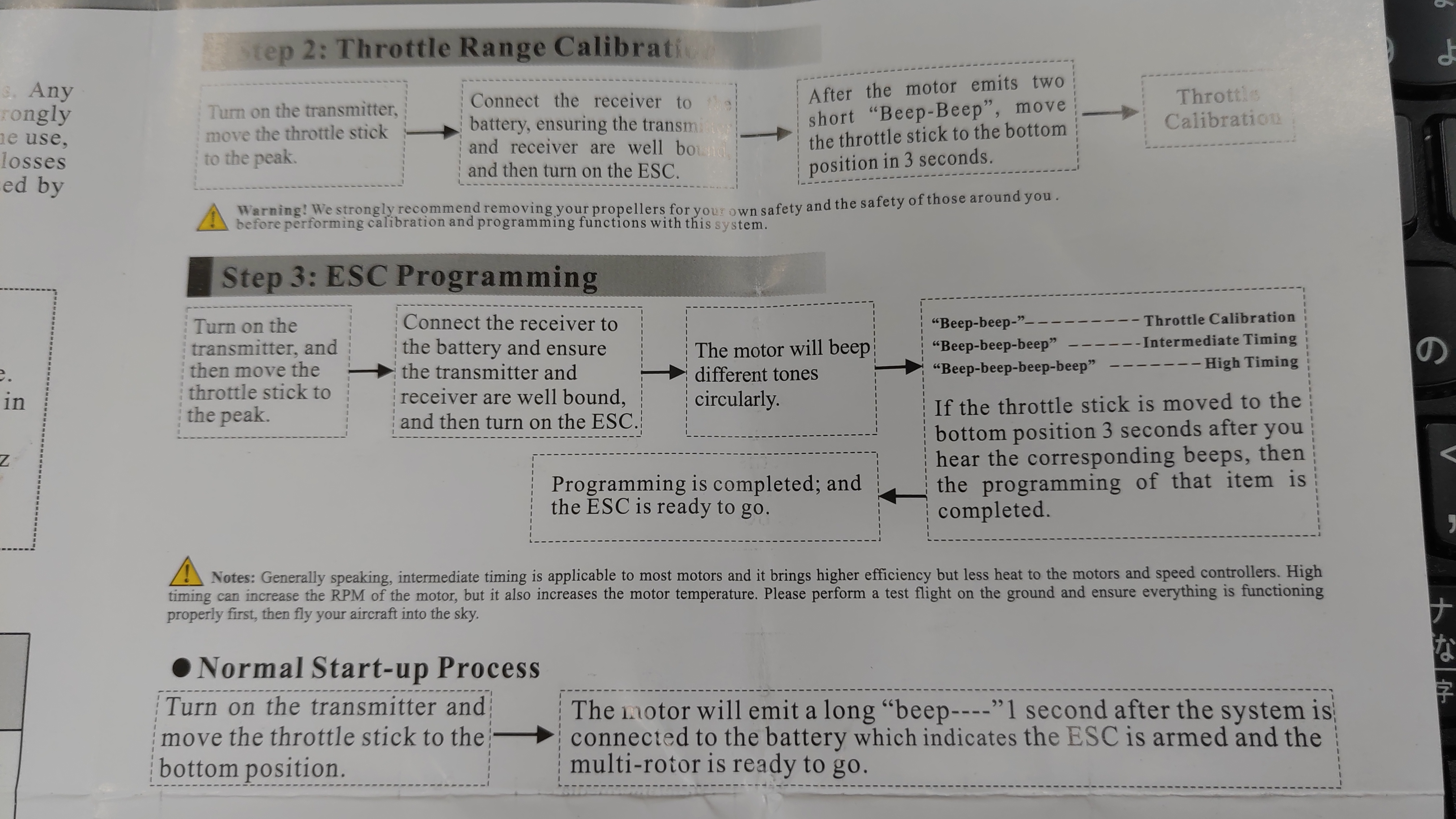
- wait for the voice info (as picture) and publish topic with pwm minimum value ‘rostopic pub -1 /pwm_test std_msgs/Float32 “data: 0.5”’ (0.5 means 1000)
- unplugin the ESC from power cable, and start to calibrate next ESC \
- If want to test calibration results, plugin ESC and publish topic with low pwm value:
rostopic pub -1 /pwm_test std_msgs/Float32 "data: 0.53"(0.53 means 1060)- repeat the process 1-5 but wait for the voice info of High Timing, to change to High Timing mode