1. Wifi-infra mode
There is a router connect all device (e.g. remote pc, on-board processor) as shown in following figure.
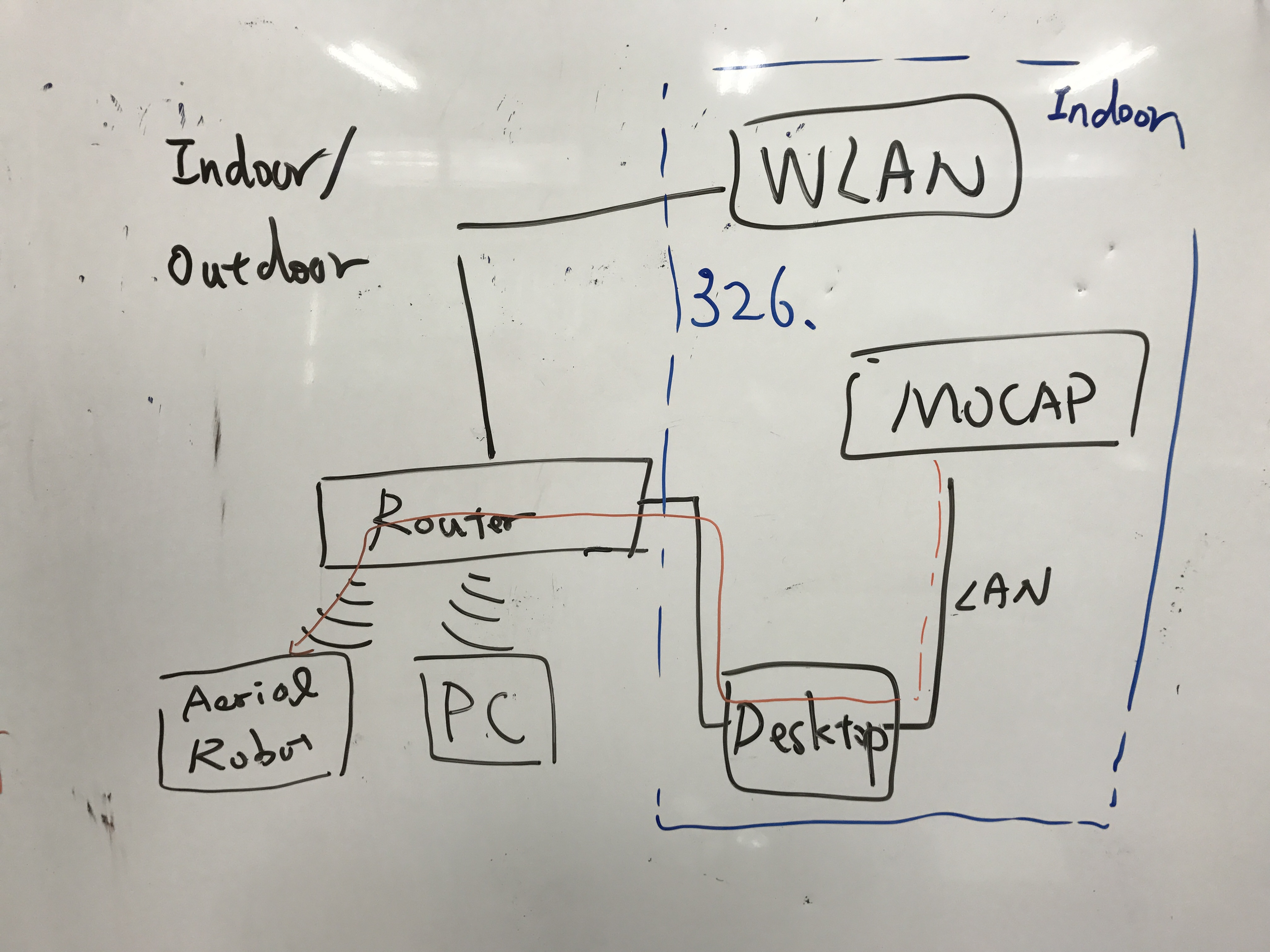 For
For estimate_mode = 0 and estimate_mode = 1, which is the mode use on-board IMU for sensor fusion (kalman filter), can use this network. This mode can enable all devices connected to the internet.
#### The discussion about wifi-infra mode 問題: estimate_mode:=2 (つまりmocapのみ、kalman filterなし)の場合、上記のネットワークの方法では、飛行制御の不安定性がみられる。一方、PCをホストとするアドホックネットワーク場合(i.e. euclid)
原因:
- 速度項を求める時の微分処理を行うときに時間のズレ+ノイズによって発生していると考えられる。
- intel euclidも内部アンテナを使っているため、5Ghz帯のwifiの速度があまり早くないと考えられる。
対処:
- estimate_mode:=2を必要とする場合(e.g. Dragonの場合)は、上記の方法ではなくPCをホストと古いアドホックネットワークの方法を使う。今のDragonはそうしている。その場合、mocapのlaunch fileは手元のリモートPC上で上げる。
- Jetson TX2で確かめる。
- estimate_mode:=0と1はsensor fusion をしているので、上記の問題が起きない。今のHydrusはそういう状況。
2. Ad-hoc mode (Old)
The remote pc is directly connected with on-board processor (which is the host of this ad-hoc mode). For estimate_mode = 2, which is the mode only depends on the motion capture, should only use this network. For instance, the current dragon robot can only use Ad-hoc mode for motion capture.
note: related issue: https://github.com/tongtybj/aerial_robot/issues/179